1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
| /******************************************************************************
*
* Copyright (C) 2009 - 2014 Xilinx, Inc. All rights reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software is
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
*
* Use of the Software is limited solely to applications:
* (a) running on a Xilinx device, or
* (b) that interact with a Xilinx device through a bus or interconnect.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL
* XILINX BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY,
* WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF
* OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
* SOFTWARE.
*
* Except as contained in this notice, the name of the Xilinx shall not be used
* in advertising or otherwise to promote the sale, use or other dealings in
* this Software without prior written authorization from Xilinx.
*
******************************************************************************/
/*
* helloworld.c: simple test application
*
* This application configures UART 16550 to baud rate 9600.
* PS7 UART (Zynq) is not initialized by this application, since
* bootrom/bsp configures it to baud rate 115200
*
* ------------------------------------------------
* | UART TYPE BAUD RATE |
* ------------------------------------------------
* uartns550 9600
* uartlite Configurable only in HW design
* ps7_uart 115200 (configured by bootrom/bsp)
*/
#include <stdio.h>
#include "platform.h"
#include "xil_printf.h"
#include "xparameters.h"
#include "xgpiops.h"
#include "xscugic.h"
#include "xil_exception.h"
#include "xplatform_info.h"
#include "sleep.h"
#define GPIO_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID //PS端GPIO器件ID
#define INIC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID //通用中断控制器ID
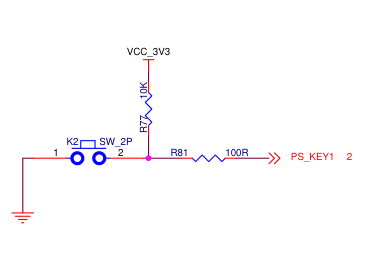
#define GPIO_INTERRUPT_ID XPAR_XGPIOPS_0_INTR //PS端GPIO中断ID
#define KEY1 9 //KEY1 连接至 MIO9
#define LED1 0 //LED1 连接至 MIO0
static void intr_handler(void *callback_ref);
int init_interrupt(XScuGic *gic_ins_ptr ,XGpioPs *gpio ,u16 GpioIntrId);
XGpioPs Gpiops;
XScuGic intc;
u32 key_flag; //按键中断标志
u32 key_val; //控制LED亮灭
int main()
{
int status;
XGpioPs_Config *ConfigPtr;
print("mio interrupt Test\n\r");
ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID);
if (ConfigPtr == NULL){
return XST_FAILURE;
}
//初始化GPIO
XGpioPs_CfgInitialize(&Gpiops ,ConfigPtr ,ConfigPtr->BaseAddr);
//设置KEY引脚方向为输入
XGpioPs_SetDirectionPin(&Gpiops ,KEY1 ,0);
//设置LED引脚方向为输出并使能输出
XGpioPs_SetDirectionPin(&Gpiops ,LED1 ,1);
XGpioPs_SetOutputEnablePin(&Gpiops ,LED1 ,1);
XGpioPs_Write(&Gpiops ,LED1 , 1);
//建立中断
status = init_interrupt(&intc ,&Gpiops ,GPIO_INTERRUPT_ID);
if (status != XST_SUCCESS){
print("Setup interrupt system failed\r\n");
return status;
}
while(1)
{
if(key_flag){ //触发中断
usleep(20000); //延时消抖
if(XGpioPs_ReadPin(&Gpiops,KEY1) == 0){ //低电平按下
key_val = ~key_val;
XGpioPs_WritePin(&Gpiops,LED1,key_val); //反转LED电平
}
key_flag = FALSE;
XGpioPs_IntrClearPin(&Gpiops,KEY1); //清除中断标志
XGpioPs_IntrEnablePin(&Gpiops,KEY1); //再次使能中断
}
}
return XST_SUCCESS;
}
//中断处理函数
static void intr_handler(void *callback_ref)
{
XGpioPs *gpio = (XGpioPs *) callback_ref;
//读取中断标志
if (XGpioPs_IntrGetStatusPin(gpio ,KEY1)){
key_flag = TRUE;
XGpioPs_IntrDisablePin(gpio ,KEY1); //屏蔽按键KEY中断
}
}
//初始化中断系统,使能KEY1按键的下降沿中断
int init_interrupt(XScuGic *gic_ins_ptr ,XGpioPs *gpio ,u16 GpioIntrId)
{
int status;
XScuGic_Config *IntcConfig;
//初始化中断控制器
IntcConfig = XScuGic_LookupConfig(INIC_DEVICE_ID);
if (IntcConfig == NULL){
return XST_FAILURE;
}
status = XScuGic_CfgInitialize(gic_ins_ptr,IntcConfig,IntcConfig->CpuBaseAddress);
if (status != XST_SUCCESS){
return XST_FAILURE;
}
//设置并使能中断
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,
(Xil_ExceptionHandler) XScuGic_InterruptHandler,gic_ins_ptr);
Xil_ExceptionEnable();
//设置中断处理函数
status = XScuGic_Connect(gic_ins_ptr,GpioIntrId,
(Xil_ExceptionHandler) intr_handler,(void *) gpio);
if (status != XST_SUCCESS) {
return status;
}
//使能中断类型为来自GPIO的中断
XScuGic_Enable(gic_ins_ptr , GpioIntrId);
//设置中断触发方式为下降沿触发
XGpioPs_SetIntrTypePin(gpio,KEY1,XGPIOPS_IRQ_TYPE_EDGE_FALLING);
//使能中断源
XGpioPs_IntrEnablePin(gpio,KEY1);
return XST_SUCCESS;
}
|