UBOOT、KERNEL移植过程(一)
Linux搭建环境
在进行UBOOT、KERNEL移植之前,需要先在Linux下搭建好开发环境,基本的有tftp环境、nfs环境、交叉编译工具链的搭建
报错处理
tftp和nfs环境搭建时,如果配置文件写错,重启服务时会有报错提示,此时需要查看系统日志根据日志消息解决问题
1
2
3
4
|
tail -f /var/log/syslog
tail -10 /var/log/syslog
|
tftp环境
tftp协议:
典型的cs模型: ubuntu为服务器端,开发板为客户端
客户端可以下载服务器端上的内容,效率高
1、查看是否已经安装tftp服务器
2、若不存在则执行以下命令安装tftp服务
1
2
3
4
5
|
sudo apt-get updata
sudo apt-get install tftpd-hpa tftp-hpa -y
|
3、创建服务器工作路径并设置为最高权限
1
2
3
4
|
sudo mkdir ~/tftp
sudo chmod 777 ~/tftp -R
|
4、修改tftp服务器配置文件
1
2
|
sudo vim /etc/default/tftpd-hpa
|
1
2
3
4
5
6
7
|
TFTP_USERNAME="tftp"
TFTP_DIRECTORY="/home/noah/tftp"
TFTP_ADDRESS=":69"
TFTP_OPTIONS="-c -s -l"
|
5、重启tftp服务,使配置生效
1
| sudo service tftpd-hpa restart
|
6、自行测试是否安装成功
nfs环境
网络文件系统(英语:Network File System,缩写作 NFS),搭建好后相当于在远程有一套文件系统,目的是使客户端主机可以访问服务器端文件,并且其过程与访问本地存储时一样
1、查看是否已经安装NFS
1
| dpkg -s nfs-kernel-server
|
2、若不存在则执行以下命令安装tftp服务
1
2
3
4
|
sudo apt-get updata
sudo apt-get install nfs-kernel-server -y
|
3、创建服务器工作路径并设置为最高权限
1
2
3
4
|
sudo mkdir -p ~/nfs/rootfs
sudo chmod 777 ~/nfs/rootfs -R
|
4、修改nfs服务器配置文件
1
2
3
|
/home/noah/nfs/rootfs/ *(rw,sync,no_subtree_check,no_root_squash)
|
这一行的详细释义为
1
2
3
|
/home/test 192.168.121.0/24(rw)
|
共享文件可执行权限的详细释义为:
| 参数 |
说明 |
| ro |
只读访问 |
| rw |
读写访问 |
| sync |
所有数据在请求时写入共享 |
| async |
nfs 在写入数据前可以响应请求 |
| secure |
nfs 通过 1024 以下的安全 TCP/IP 端口发送 |
| insecure |
nfs 通过 1024 以上的端口发送 |
| wdelay |
如果多个用户要写入 nfs 目录,则归组写入(默认) |
| no_wdelay |
如果多个用户要写入 nfs 目录,则立即写入,当使用 async 时,无需此设置 |
| hide |
在 nfs 共享目录中不共享其子目录 |
| no_hide |
共享 nfs 目录的子目录 |
| subtree_check |
如果共享 /usr/bin 之类的子目录时,强制 nfs 检查父目录的权限(默认) |
| no_subtree_check |
不检查父目录权限 |
| all_squash |
共享文件的 UID 和 GID 映射匿名用户 anonymous,适合公用目录 |
| no_all_squash |
保留共享文件的 UID 和 GID(默认) |
| root_squash |
root 用户的所有请求映射成如 anonymous 用户一样的权限(默认) |
| no_root_squash |
root 用户具有根目录的完全管理访问权限 |
| anonuid=xxx |
指定 nfs 服务器 /etc/passwd 文件中匿名用户的 UID |
| anongid=xxx |
指定 nfs 服务器 /etc/passwd 文件中匿名用户的 GID |
5、重启nfs服务,使得配置生效
1
| sudo service nfs-kernel-server restart
|
交叉编译工具链
Buildroot制作交叉编译器
一般来说,制作交叉编译器,有两种工具,即crosstool-NG 和Buildroot,制作交叉编译器仅是第一步,后续还需要使用交叉编译器移植bootloader、kernel和制作根文件系统rootfs以及交叉编译各种需要的应用程序。其中 crosstool-NG 只是制作了一个交叉编译器,而如果你希望一键完成这所有的事情, 则可以使用 Buildroot 。
Buildroot是一组Makefile和Patch文件,用来简化和自动化为嵌入式系统建造一个完整和可引导的Linux环境的过程,特别是在使用交叉编译来允许在单一的基于Linux的开发系统上为多个目标平台进行建造的时候。Buildroot可以自动建造所需要的交叉编译工具链,创建根文件系统,编译一个Linux内核映像,并为目标嵌入式系统生成引导装载器,它还可以进行这些独立步骤的任何组合。
接下来我们将介绍如何使用 buildroot 来制作交叉编译器,同时生成一个开发板可以使用的根文件系统。需要注意的是,因为 Linux 内核 和 u-boot 今后需要自己针对开发板做移植修改,所以这里将不编译 Linux内核 和 u-boot 程序。
使用Buildroot构建交叉编译工具链请看郭工的文档:i.MX6ULL开发板-Buildroot制作交叉编译器
Uboot
uboot是BootLoader的一种,可以利用uboot制作sd卡启动盘,下面是uboot的详细介绍
U-Boot,全称 Universal Boot Loader,是遵循GPL条款的从FADSROM、8xxROM、PPCBOOT逐步发展演化而来的 开放源码项目。
U-boot,是一个主要用于嵌入式系统的引导加载程序,可以支持多种不同的计算机系统结构,其主要作用为:引导系统的启动。
目前,U-Boot不仅支持Linux系统的引导,还支持NetBSD, VxWorks, QNX, RTEMS, ARTOS, LynxOS, android等多种嵌入式操作系统。
uboot开发源码
uboot目录结构
| 目录名称 |
主要内容 |
| api |
uboot中的接口函数 |
| arch |
uboot中有关处理器架构的相关的代码 |
| board |
为开发板定制的相关代码 |
| common |
通用代码,大部分与命令行有关 |
| disk |
磁盘分区相关代码 |
| doc |
有关README、.md、.txt相关代码 |
| drivers |
与驱动程序相关的代码 |
| examples |
示例程序 |
| fs |
文件系统,适合大部分开发板上的文件系统 |
| include |
包含全局的头文件 |
| lib |
通用库文件 |
| net |
网络相关代码,小型协议栈 |
| post |
Power On Self Test,上电自检程序 |
| tools |
辅助程序,用于编译和检查uboot目标文件 |
移植Uboot
配置uboot defconfig
准备:下载好郭工文件服务器下提供的imx6ull的相关源码,使用的芯片为imx6ull,对应板卡为“IGKBoard”
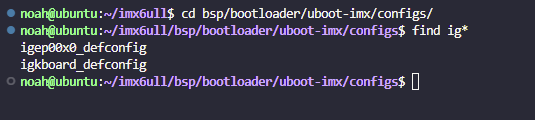
在下载的imx6ull的文件夹下,进入uboot的configs文件夹
1
2
| noah@ubuntu:~/imx6ull$ cd bsp/bootloader/uboot-imx/configs/
noah@ubuntu:~/imx6ull/bsp/bootloader/uboot-imx/configs$ find ig*
|
以下是详细释义
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
| CONFIG_ARM=y
CONFIG_ARCH_MX6=y
CONFIG_SYS_MALLOC_LEN=0x1000000
CONFIG_NR_DRAM_BANKS=1
CONFIG_SYS_MEMTEST_START=0x80000000
CONFIG_SYS_MEMTEST_END=0x88000000
CONFIG_ENV_SIZE=0x2000
CONFIG_ENV_OFFSET=0xE0000
CONFIG_IMX_CONFIG="board/lingyun/igkboard/imximage.cfg"
CONFIG_SYS_PROMPT="[u-boot@igkboard]# "
CONFIG_MX6ULL=y
CONFIG_TARGET_LINGYUN_IGKBOARD=y
CONFIG_SYS_I2C_MXC_I2C1=y
CONFIG_SYS_I2C_MXC_I2C2=y
CONFIG_DM_GPIO=y
CONFIG_DEFAULT_DEVICE_TREE="igkboard"
CONFIG_SUPPORT_RAW_INITRD=y
CONFIG_USE_BOOTCOMMAND=y
CONFIG_BOOTDELAY=3
CONFIG_SYS_CONSOLE_IS_IN_ENV=y
CONFIG_BOARD_EARLY_INIT_F=y
CONFIG_HUSH_PARSER=y
CONFIG_CMD_BOOTZ=y
CONFIG_CMD_MEMTEST=y
CONFIG_CMD_GPIO=y
CONFIG_CMD_I2C=y
CONFIG_CMD_MMC=y
CONFIG_CMD_SF=y
CONFIG_CMD_USB=y
CONFIG_CMD_DHCP=y
CONFIG_CMD_PING=y
CONFIG_CMD_BMP=y
CONFIG_CMD_CACHE=y
CONFIG_CMD_NET=y
CONFIG_CMD_EXT2=y
CONFIG_CMD_EXT4=y
CONFIG_CMD_EXT4_WRITE=y
CONFIG_CMD_FAT=y
CONFIG_CMD_FS_GENERIC=y
CONFIG_OF_CONTROL=y
CONFIG_ENV_OVERWRITE=y
CONFIG_ENV_IS_IN_MMC=y
CONFIG_SYS_RELOC_GD_ENV_ADDR=y
CONFIG_SYS_MMC_ENV_DEV=1
CONFIG_ENV_VARS_UBOOT_RUNTIME_CONFIG=y
CONFIG_BOUNCE_BUFFER=y
CONFIG_DM_74X164=y
CONFIG_DM_I2C=y
CONFIG_SYS_I2C_MXC=y
CONFIG_FSL_USDHC=y
CONFIG_MTD=y
CONFIG_DM_SPI_FLASH=y
CONFIG_SF_DEFAULT_SPEED=40000000
CONFIG_SPI_FLASH_STMICRO=y
CONFIG_PHYLIB=y
CONFIG_PHY_MICREL=y
CONFIG_PHY_MICREL_KSZ8XXX=y
CONFIG_DM_ETH=y
CONFIG_DM_ETH_PHY=y
CONFIG_FEC_MXC=y
CONFIG_MII=y
CONFIG_PINCTRL=y
CONFIG_PINCTRL_IMX6=y
CONFIG_DM_REGULATOR=y
CONFIG_DM_REGULATOR_FIXED=y
CONFIG_DM_REGULATOR_GPIO=y
CONFIG_MXC_UART=y
CONFIG_SPI=y
CONFIG_DM_SPI=y
CONFIG_FSL_QSPI=y
CONFIG_SOFT_SPI=y
CONFIG_IMX_THERMAL=y
CONFIG_USB=y
CONFIG_USB_STORAGE=y
CONFIG_CMD_USB_MASS_STORAGE=y
CONFIG_USB_HOST_ETHER=y
CONFIG_USB_ETHER_ASIX=y
CONFIG_DM_VIDEO=y
CONFIG_VIDEO_LOGO=y
CONFIG_SYS_WHITE_ON_BLACK=y
CONFIG_VIDEO_MXS=y
CONFIG_SPLASH_SCREEN=y
CONFIG_SPLASH_SCREEN_ALIGN=y
CONFIG_BMP_16BPP=y
CONFIG_USB_GADGET=y
CONFIG_USB_GADGET_DOWNLOAD=y
CONFIG_USB_GADGET_MANUFACTURER="FSL"
CONFIG_USB_GADGET_VENDOR_NUM=0x0525
CONFIG_USB_GADGET_PRODUCT_NUM=0xa4a5
CONFIG_CI_UDC=y
CONFIG_CMD_FASTBOOT=y
CONFIG_USB_FUNCTION_FASTBOOT=y
CONFIG_FASTBOOT_UUU_SUPPORT=y
CONFIG_FASTBOOT=y
CONFIG_FASTBOOT_BUF_ADDR=0x83800000
CONFIG_FASTBOOT_BUF_SIZE=0x40000000
CONFIG_FASTBOOT_FLASH=y
CONFIG_EFI_PARTITION=y
CONFIG_ARCH_MISC_INIT=y
CONFIG_DM_RNG=y
CONFIG_CMD_RNG=y
CONFIG_FSL_DCP_RNG=y
CONFIG_OF_SYSTEM_SETUP=y
CONFIG_CMD_CRC32=y
CONFIG_CRC32_VERIFY=y
CONFIG_OF_LIBFDT_OVERLAY=y
CONFIG_NET_RANDOM_ETHADDR=y
CONFIG_DM_SERIAL=y
|
需要特别注意的是这几行,其他为对板卡的系统设置
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
|
CONFIG_DEFAULT_DEVICE_TREE="igkboard"
CONFIG_IMX_CONFIG="board/lingyun/igkboard/imximage.cfg"
CONFIG_SYS_PROMPT="[u-boot@igkboard]# "
CONFIG_TARGET_LINGYUN_IGKBOARD=y
|
根据前面分类可知,board文件夹下是为开发板定制的相关代码,那么其指示的i.MX配置文件即为郭工对igkboard板卡的定制配置文件。
同时这里还指定了uboot的命令行指示符和默认的igkboard.dtb,一个是进入uboot命令窗时配置的命令行提示,一个是查找文件目录下的设备树指定名称并引导,这也告诉了我们为什么前面驱动学习的时候为什么设备树编译出来的文件名称一定是igkboard.btb。
添加开发板对应的头文件
添加开发板对应的头文件,操作的目录在 “include/configs/”下
1
2
|
cp mx6ullevk.h igkboard.h
|
这就创建了自己开发板的头文件,接下来对igkboard.h进行自定义修改
uboot包含什么功能基本上都是由这个文件控制,换句话说我们可以根据这个文件完成对uboot的裁剪。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
|
#ifndef __IGKBOARD_CONFIG_H
#define __IGKBOARD_CONFIG_H
#include <asm/arch/imx-regs.h>
#include <linux/sizes.h>
#include <linux/stringify.h>
#include "mx6_common.h"
#include <asm/mach-imx/gpio.h>
#include "imx_env.h"
#define is_mx6ull_9x9_evk() CONFIG_IS_ENABLED(TARGET_MX6ULL_9X9_EVK)
#ifdef CONFIG_TARGET_MX6ULL_9X9_EVK
#define PHYS_SDRAM_SIZE SZ_256M
#define BOOTARGS_CMA_SIZE "cma=96M "
#else
#define PHYS_SDRAM_SIZE SZ_512M
#define BOOTARGS_CMA_SIZE ""
#undef CONFIG_LDO_BYPASS_CHECK
#endif
#define CONFIG_MXC_UART_BASE UART1_BASE
#ifdef CONFIG_FSL_USDHC
#define CONFIG_SYS_FSL_ESDHC_ADDR USDHC2_BASE_ADDR
#ifdef CONFIG_NAND_MXS
#define CONFIG_SYS_FSL_USDHC_NUM 1
#else
#define CONFIG_SYS_FSL_USDHC_NUM 2
#endif
#endif
#ifdef CONFIG_NAND_BOOT
#define MFG_NAND_PARTITION "mtdparts=gpmi-nand:64m(nandboot),16m(nandkernel),16m(nanddtb),16m(nandtee),-(nandrootfs)"
#else
#define MFG_NAND_PARTITION ""
#endif
#define CONFIG_CMD_READ
#define CONFIG_SERIAL_TAG
#define CONFIG_FASTBOOT_USB_DEV 0
#define CONFIG_MFG_ENV_SETTINGS \
CONFIG_MFG_ENV_SETTINGS_DEFAULT \
"initrd_addr=0x86800000\0" \
"initrd_high=0xffffffff\0" \
"emmc_dev=1\0"\
"emmc_ack=1\0"\
"sd_dev=1\0" \
"mtdparts=" MFG_NAND_PARTITION \
"\0"\
#if defined(CONFIG_NAND_BOOT)
#define CONFIG_EXTRA_ENV_SETTINGS \
CONFIG_MFG_ENV_SETTINGS \
TEE_ENV \
"splashimage=0x8c000000\0" \
"fdt_addr=0x83000000\0" \
"fdt_high=0xffffffff\0" \
"tee_addr=0x84000000\0" \
"console=ttymxc0\0" \
"bootargs=console=ttymxc0,115200 ubi.mtd=nandrootfs " \
"root=ubi0:rootfs rootfstype=ubifs " \
BOOTARGS_CMA_SIZE \
MFG_NAND_PARTITION \
"\0" \
"bootcmd=nand read ${loadaddr} 0x4000000 0xc00000;"\
"nand read ${fdt_addr} 0x5000000 0x100000;"\
"if test ${tee} = yes; then " \
"nand read ${tee_addr} 0x6000000 0x400000;"\
"bootm ${tee_addr} - ${fdt_addr};" \
"else " \
"bootz ${loadaddr} - ${fdt_addr};" \
"fi\0"
#else
#include "igkboard_overlay.h"
#define CONFIG_EXTRA_ENV_SETTINGS \
"env_conf=config.txt\0" \
"image=zImage\0" \
"console=ttymxc0\0" \
"fdt_file=igkboard.dtb\0" \
"fdt_addr=0x83000000\0" \
"splashimage=0x8c000000\0" \
"ipaddr=192.168.2.22\0" \
"serverip=192.168.2.2\0" \
"mmcpart=1\0" \
"mmcargs=setenv bootargs console=${console},${baudrate} root=/dev/mmcblk${mmc_no}p2 rootwait rw net.ifnames=0\0" \
"loadenvconf=fatload mmc ${mmcdev}:${mmcpart} ${loadaddr} ${env_conf};env import -t ${loadaddr} ${filesize}\0" \
"loadimage=fatload mmc ${mmcdev}:${mmcpart} ${loadaddr} ${image}\0" \
"loadfdt=fatload mmc ${mmcdev}:${mmcpart} ${fdt_addr} ${fdt_file}\0" \
"bdtb=tftp $fdt_addr $fdt_file && fatwrite mmc 1:1 $fdt_addr $fdt_file $filesize\0" \
"bker=tftp $loadaddr $image&& fatwrite mmc 1:1 $loadaddr $image $filesize\0" \
"bsys=run bdtb && run bker\0" \
"mmcboot=echo Booting from mmc ...; " \
"mmc dev ${mmcdev}; " \
"run mmcargs; run loadenvconf;" \
"run loadimage; run loadfdt; " \
"bootz ${loadaddr} - ${fdt_addr}\0" \
"netboot=echo Booting from net ...; " \
"tftp $loadaddr $image; tftp $fdt_addr ${fdt_file};" \
"run mmcargs; " \
"bootz ${loadaddr} - ${fdt_addr}\0" \
"upmode=fastboot 0\0" \
"bbl=tftp ${loadaddr} u-boot-igkboard.imx && mmc dev ${mmcdev} 1 && mmc write ${loadaddr} 2 0x500\0" \
MMC_FDT_OVERLAY_SETTING \
"bootcmd=run mmcbootdto\0" \
"author=linke\0"
#endif
#define PHYS_SDRAM MMDC0_ARB_BASE_ADDR
#define CONFIG_SYS_SDRAM_BASE PHYS_SDRAM
#define CONFIG_SYS_INIT_RAM_ADDR IRAM_BASE_ADDR
#define CONFIG_SYS_INIT_RAM_SIZE IRAM_SIZE
#define CONFIG_SYS_INIT_SP_OFFSET \
(CONFIG_SYS_INIT_RAM_SIZE - GENERATED_GBL_DATA_SIZE)
#define CONFIG_SYS_INIT_SP_ADDR \
(CONFIG_SYS_INIT_RAM_ADDR + CONFIG_SYS_INIT_SP_OFFSET)
#define CONFIG_SYS_MMC_ENV_DEV 1
#define CONFIG_MMCROOT "/dev/mmcblk1p2"
#define CONFIG_IOMUX_LPSR
#ifdef CONFIG_NAND_MXS
#define CONFIG_SYS_MAX_NAND_DEVICE 1
#define CONFIG_SYS_NAND_BASE 0x40000000
#define CONFIG_SYS_NAND_USE_FLASH_BBT
#endif
#ifdef CONFIG_CMD_USB
#define CONFIG_EHCI_HCD_INIT_AFTER_RESET
#define CONFIG_MXC_USB_PORTSC (PORT_PTS_UTMI | PORT_PTS_PTW)
#define CONFIG_MXC_USB_FLAGS 0
#define CONFIG_USB_MAX_CONTROLLER_COUNT 2
#endif
#define CONFIG_FEC_XCV_TYPE RMII
#define CONFIG_ETHPRIME "eth1"
#ifndef CONFIG_SPL_BUILD
#if defined(CONFIG_DM_VIDEO)
#define CONFIG_VIDEO_LINK
#endif
#endif
#endif
|
添加板级支持包
接下来去查看这里所指示的board/lingyun/igkboard这个文件夹下即为板级支持包的文件
1
2
3
4
5
6
7
8
9
10
|
cp board/freescale/mx6ullevk board/lingyun/igkboard -r
mv mx6ullevk.c igkboard.c
|
对Kconfig文件的修改
(注意该文件endif后面必须有换行)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
if TARGET_MX6ULL_14X14_EVK || TARGET_MX6ULL_9X9_EVK
config SYS_BOARD
default "mx6ullevk"
config SYS_VENDOR
default "freescale"
config SYS_CONFIG_NAME
default "mx6ullevk"
config IMX_CONFIG
default "board/freescale/mx6ullevk/imximage.cfg"
config SYS_TEXT_BASE
default 0x87800000
endif
|
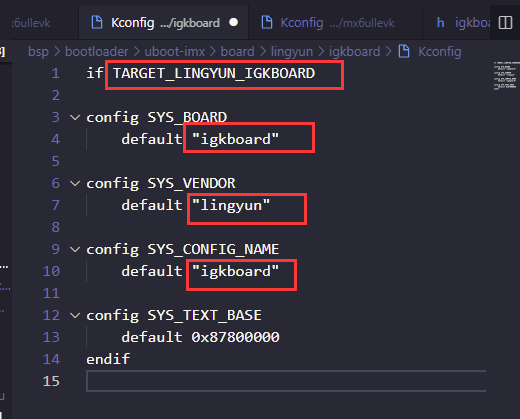
修改后的Kconfig
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| if TARGET_LINGYUN_IGKBOARD
config SYS_BOARD
default "igkboard"
config SYS_VENDOR
default "lingyun"
config SYS_CONFIG_NAME
default "igkboard"
config SYS_TEXT_BASE
default 0x87800000
endif
|
可以看出主要修改了这几个地方
MAINTAINERS文件
接下来是对MAINTAINERS文件的修改,将MAINTAINERS修改为
1
2
3
4
5
6
| LingYun IoT Gateway Board(IGKBoard)
M: Guo Wenxue <guowenxue@gmail.com>
S: Maintained
F: board/lingyun/igkboard/
F: include/configs/igkboard.h
F: configs/igkboard_defconfig
|
MAINTAINERS文件是一个代码库中的清单,列出了负责维护该代码库的人员及其联系方式。通常,这个清单包括了代码库的作者、核心开发者和其他重要的贡献者。
在开源项目中,MAINTAINERS文件是一个重要的组成部分,因为它可以帮助新的贡献者找到可联系的人员,向他们提供更改意见或报告问题。此外,这个清单还可以帮助协调贡献者之间的工作,防止多人同时修改同一个文件等冲突情况的发生。
通常,MAINTAINERS文件存放在代码库的根目录下,以文本文件的形式存在。该文件的格式不是标准规范,但通常包含姓名、邮箱地址、职位、领域专长等信息。
- M: Guo Wenxue guowenxue@gmail.com
- M 表示这是一个维护者(Maintainer)条目。
- Guo Wenxue 是该项目LingYun IoT Gateway Board(IGKBoard)的维护者姓名。
- guowenxue@gmail.com 是联系该维护者的邮箱地址。
- S: Maintained
- S 表示状态(Status)条目。
- Maintained表示这个项目正在被维护。
- F: board/lingyun/igkboard/
- F 表示文件(File)条目。
- board/lingyun/igkboard/是指LingYun IoT Gateway Board(IGKBoard)项目中与板卡相关的代码存储在board/lingyun/igkboard/目录下。
- F: include/configs/igkboard.h
- include/configs/igkboard.h是指LingYun IoT Gateway Board(IGKBoard)项目的配置文件存储在include/configs/igkboard.h中。
- F: configs/igkboard_defconfig
- configs/igkboard_defconfig是指LingYun IoT Gateway Board(IGKBoard)项目的默认配置文件存储在configs/igkboard_defconfig中。
修改Makefile文件
修改Makefile文件
1
2
3
4
5
6
|
obj-y := igkboard.o
obj-y += ../../freescale/common/mmc.o
|
设备树文件
添加自己板子所对应的设备树文件
1
| vim arch/arm/dts/igkboard.dts
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
/dts-v1/;
#include "imx6ull.dtsi"
#include "imx6ul-14x14-evk.dtsi"
#include "imx6ul-14x14-evk-u-boot.dtsi"
/ {
model = "LingYun IoT Gateway Board";
compatible = "fsl,imx6ull-14x14-evk", "fsl,imx6ull";
};
&clks {
assigned-clocks = <&clks IMX6UL_CLK_PLL3_PFD2>;
assigned-clock-rates = <320000000>;
};
|
修改arch/arm/dts/Makefile
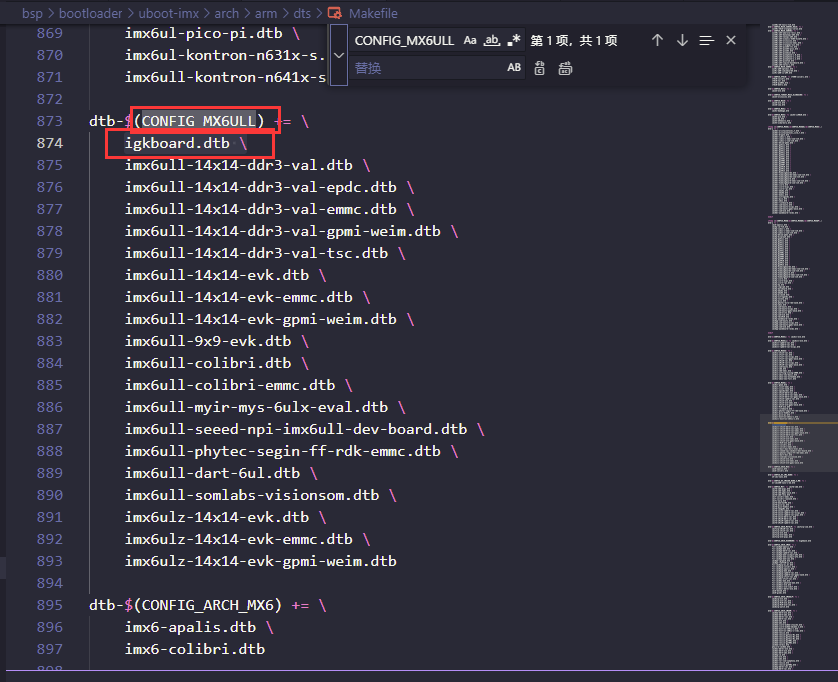
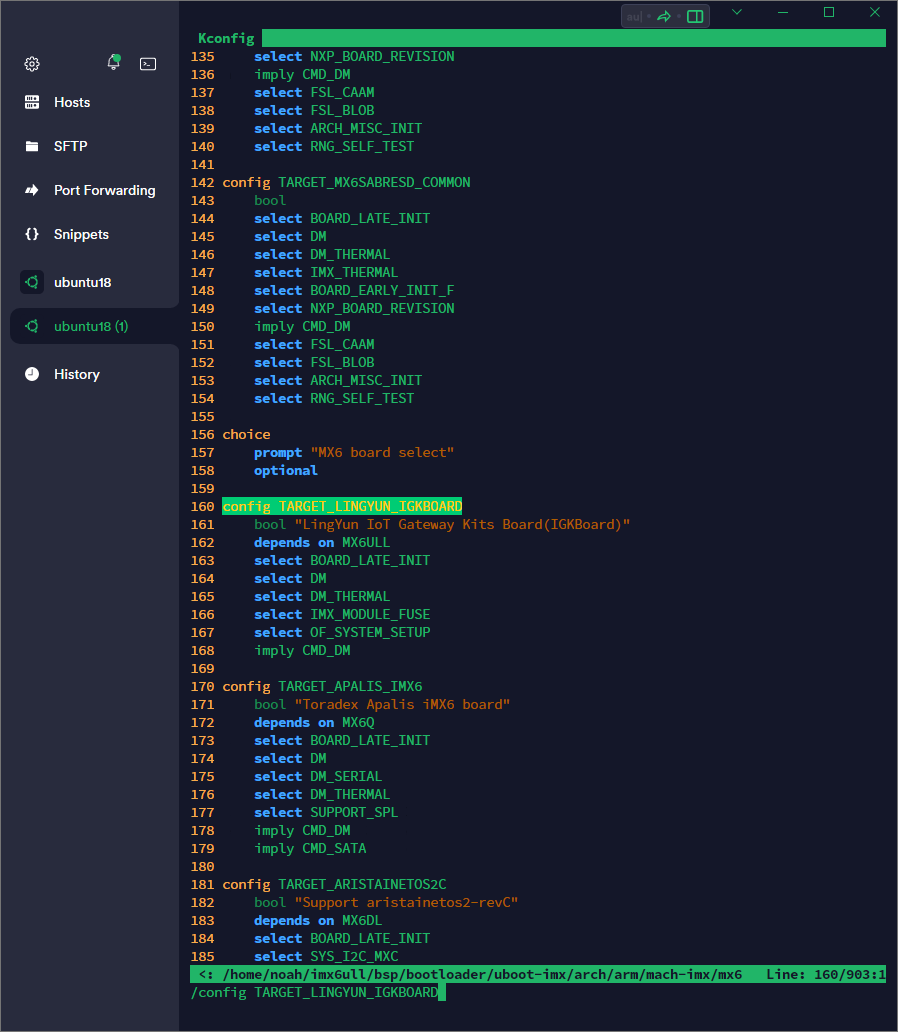
将我们的开发板添加进编译uboot的编译选项,修改arch/arm/mach-imx/mx6/Kconfig文件:
1
| vim arch/arm/mach-imx/mx6/Kconfig
|
1
2
3
4
|
choice
prompt "MX6 board select"
optional
|
1
2
3
4
5
6
7
8
9
| config TARGET_LINGYUN_IGKBOARD
bool "LingYun IoT Gateway Kits Board(IGKBoard)"
depends on MX6ULL
select BOARD_LATE_INIT
select DM
select DM_THERMAL
select IMX_MODULE_FUSE
select OF_SYSTEM_SETUP
imply CMD_DM
|
在大约160行的位置,这里TARGET_LINGYUN_IGKBOARD和前面配置的相同
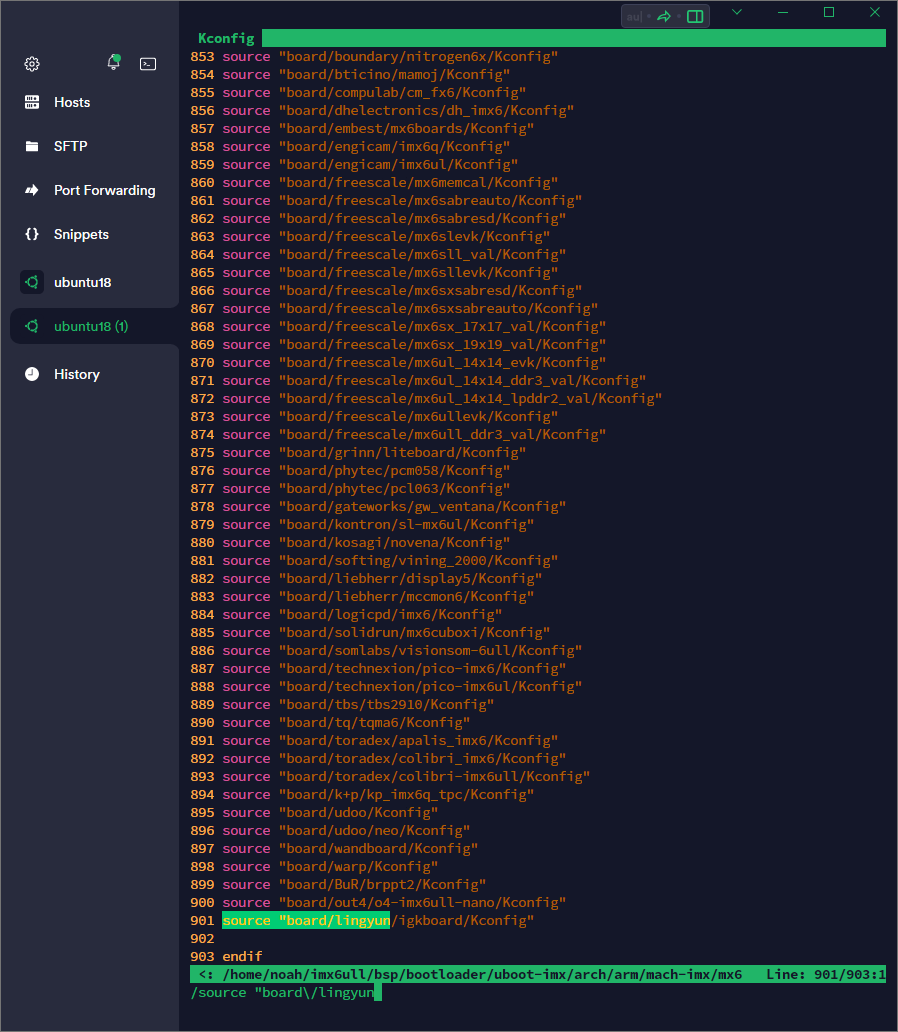
再翻到最后,一堆source这里,将板子的配置添加上
1
| source "board/lingyun/igkboard/Kconfig"
|
编译uboot
先回到uboot-imx目录
1
2
|
noah@ubuntu:~/imx6ull/bsp/bootloader/uboot-imx$ make distclean
|
1
2
| # 设置编译配置文件为自定义的
noah@ubuntu:~/imx6ull/bsp/bootloader/uboot-imx$ make igkboard_defconfig
|
1
2
|
noah@ubuntu:~/imx6ull/bsp/bootloader/uboot-imx$ make -j8
|
1
2
3
| make distclean
make mx6ull_14x14_hello_emmc_defconfig
make -j 2
|
编译完成
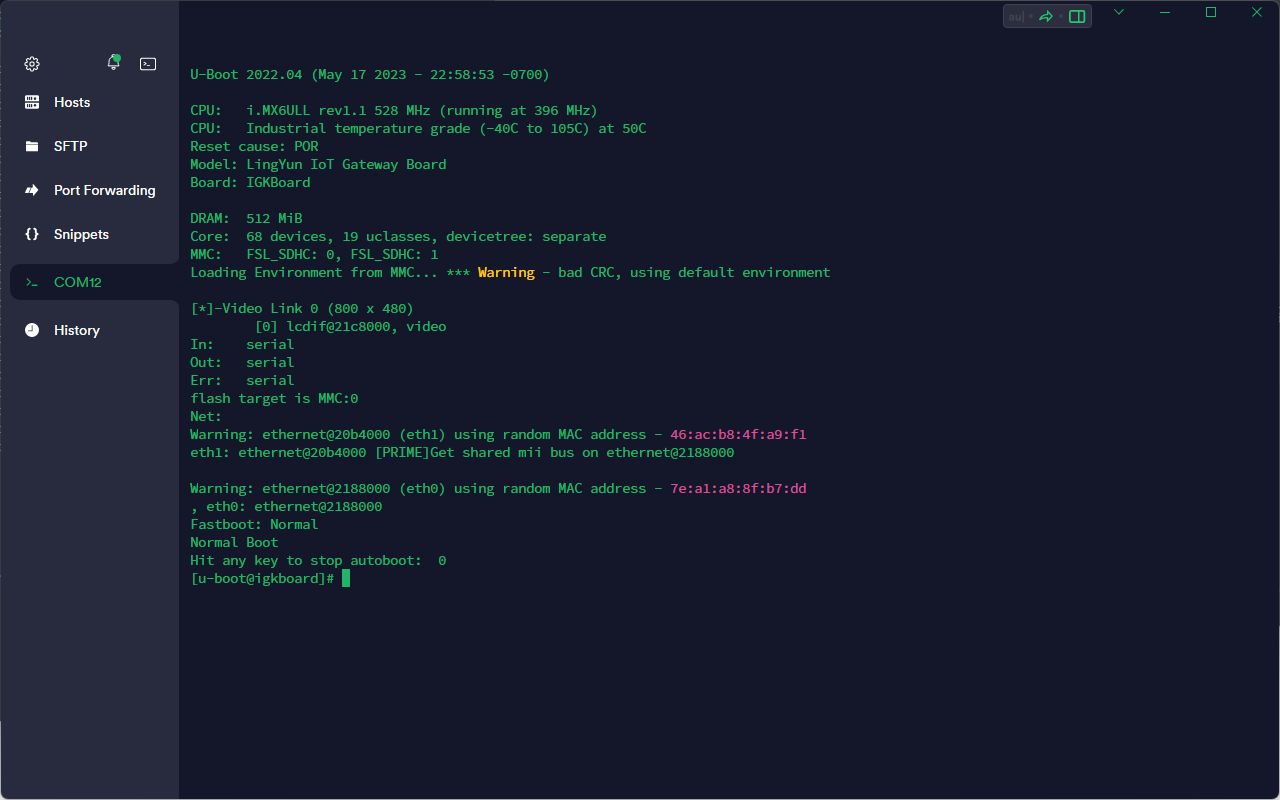
SD卡烧录uboot并启动测试
插入sd卡,使用以下命令查看sd卡位置,因为SD卡插入ubuntu后,会出现/dev/sdX,具体是/dev/sdb还是/dev/sdc又或者是/dev/sdd要视个人插入ubuntu的USB口设备情况而定。
同样在编译完成的目录下
1
| sudo dd if=u-boot-dtb.imx of=/dev/sdb bs=1k seek=1 conv=fsync
|
dd命令可从标准输入或文件中读取数据,根据指定的格式来转换数据,再输出到文件、设备或标准输出。详细命令解释参见:https://www.runoob.com/linux/linux-comm-dd.html
将SD卡插入板子卡槽,设置板子上的拨码开关为SD卡启动,控制台打印内容如下